Netweaver
经验
html
慢速外设接口
defer
excel
libbinder
云编程
Terminal
终端
生活
#产品思维
引用
MySQL集群搭建
两数之和
flyfish
自动批量下载图片的插件
openresty
BH1750
延迟
ORB-SLAM2
2024/4/17 3:03:57
(01)ORB-SLAM2源码无死角解析-(37) EPnP 算法原理详解→理论基础一:控制点选取、透视投影约束
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方…
(01)ORB-SLAM2源码无死角解析-(04)单目追踪_总体框架讲解TrackMonocular→GrabImageMonocular
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

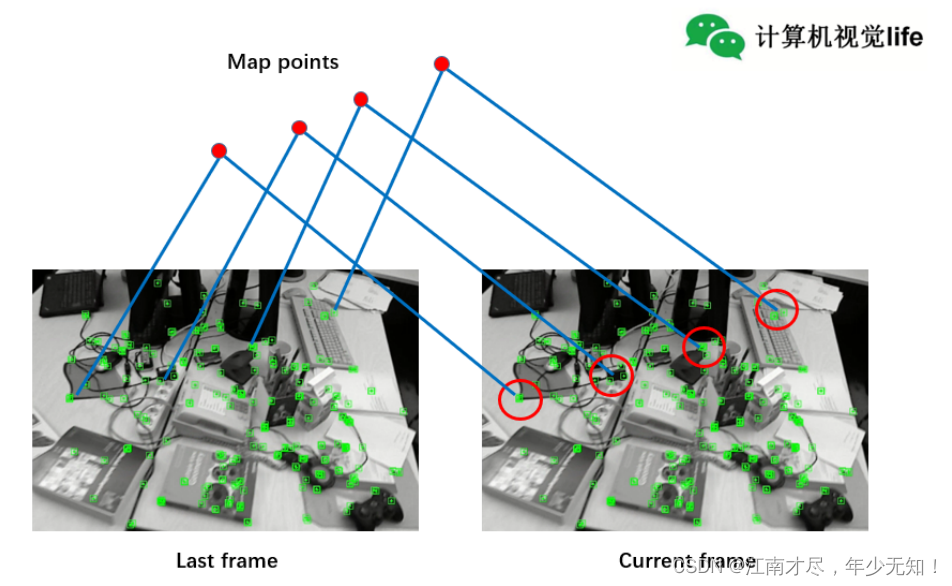
(01)ORB-SLAM2源码无死角解析-(47) 跟踪线程→局部地图跟踪TrackLocalMap():局部地图点过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(28) 双目Stereo相机立体匹配,SAD算法→深度求解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(11)ORBextractor::operator()→BRIEF描述子
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(19) 重投影误差,卡方检验→CheckFundamental,CheckHomography
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(48) 不同跟踪方法的对比、梳理完整跟踪流程→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(10.3) - g2o(图优化)→边(Edge)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
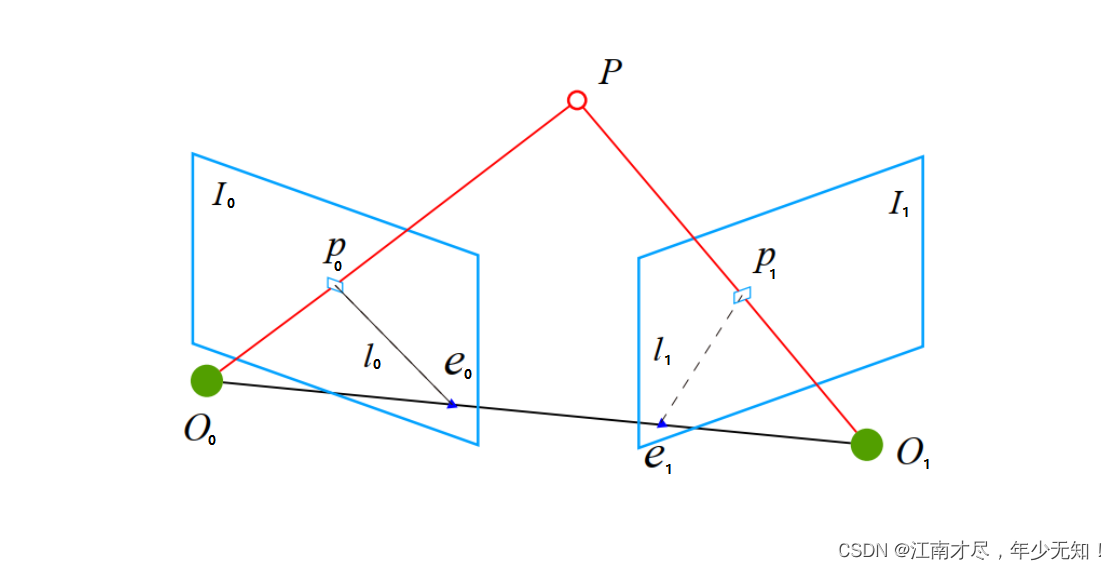
史上最简SLAM零基础解读(5) - Homography,Fundamental,Essential深入浅出→了解适用场景:共面、非共面、仅旋转
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
通过文首的一系列博客,相信大家对于 Homography,Fundamental,Essential 矩阵已经有了一一定认知,比如 单应…
(01)ORB-SLAM2源码无死角解析-(58) 闭环线程→计算Sim3: 源码Sim3Solver::iterate()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
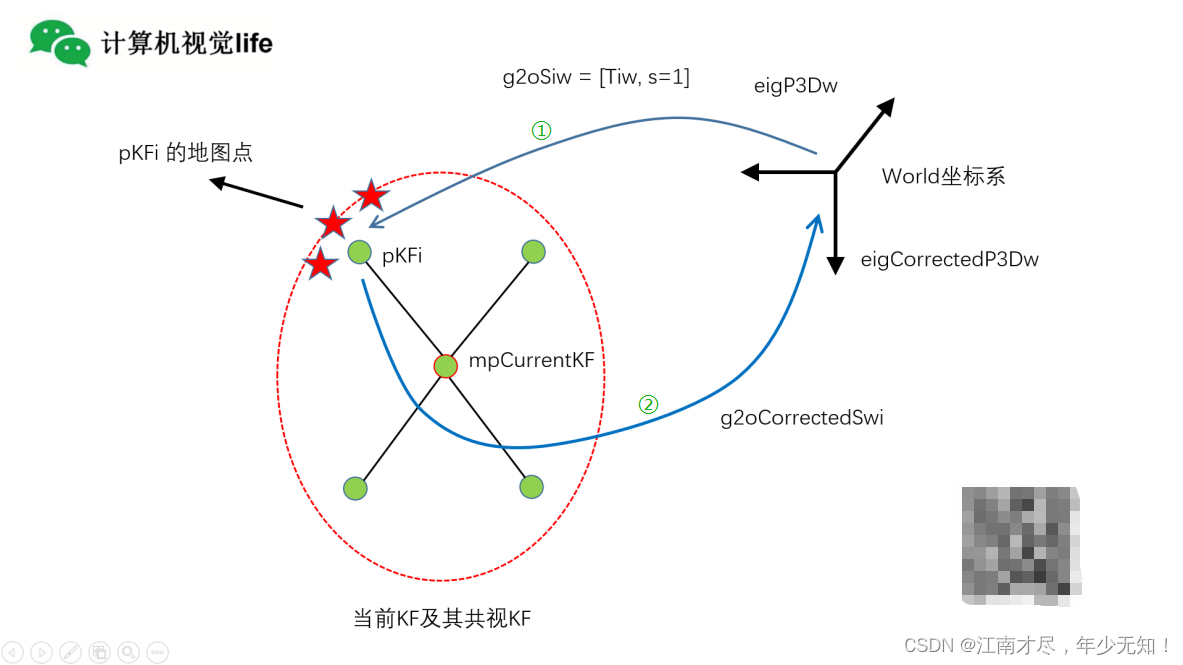
(01)ORB-SLAM2源码无死角解析-(59) 闭环线程→闭环矫正: CorrectLoop→位姿传播,地图点矫正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
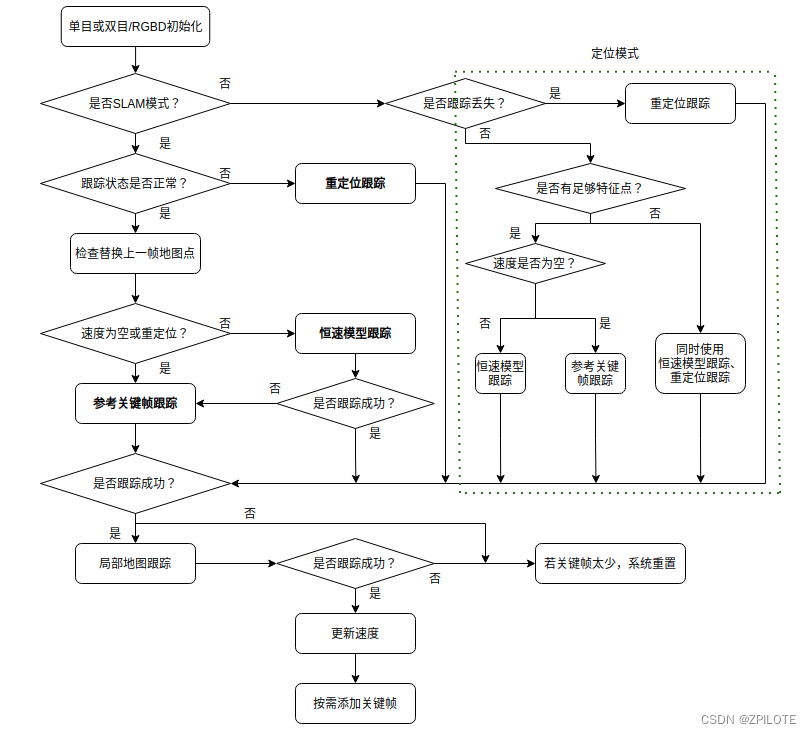
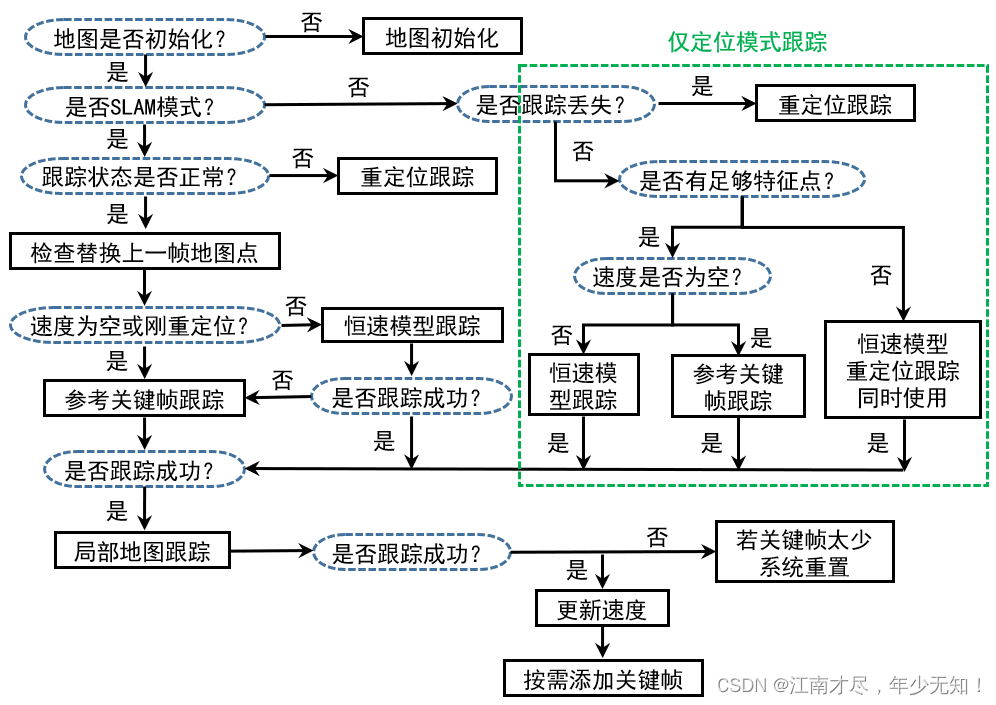
ORB-SLAM2算法13之跟踪线程Tracking
文章目录 0 引言1 跟踪线程Tracking1.1 概述1.2 初始化1.2.1 单目初始化1.2.2 双目/RGBD初始化 1.3 跟踪方法1.3.1 恒速模型跟踪1.3.2 参考关键帧跟踪1.3.3 重定位跟踪 1.4 局部地图跟踪1.4.1 流程1.4.2 更新局部关键帧1.4.3 更新局部地图点1.4.4 进一步优化 1.5 关键帧生成1.5…

(01)ORB-SLAM2源码无死角解析-(60) 闭环线程→闭环矫正: CorrectLoop→地图点融合、共视关系更新
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(44) EPnP 源代码分析(4)→PnPsolver::qr_solve():QR分解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正…
(01)ORB-SLAM2源码无死角解析-(21) 基本矩阵Fundamental→本质矩阵Essential 分解恢复 Rt
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(33) ORB特征匹配→局部建图BoW加速匹配,三角化SearchForTriangulation
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

ORB-SLAM2算法15之回环检测线程Loop Closing
文章目录 0 引言1 概述2 回环主函数3 回环检测4 计算Sim3变换5 回环矫正 0 引言
ORB-SLAM2算法7详细了解了System主类和多线程、ORB-SLAM2学习笔记8详细了解了图像特征点提取和描述子的生成、ORB-SLAM2算法9详细了解了图像帧、ORB-SLAM2算法10详细了解了图像关键帧、ORB-SLAM2…
(01)ORB-SLAM2源码无死角解析-(43) EPnP 源代码分析(3)→find_betas_approx(),gauss_newton()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

ORB-SLAM2学习笔记7之System主类和多线程
文章目录 0 引言1 整体框架1.1 整体流程 2 System主类2.1 成员函数2.2 成员变量 3 多线程3.1 ORB-SLAM2中的多线程3.2 加锁 0 引言
ORB-SLAM2是一种基于特征的视觉SLAM(Simultaneous Localization and Mapping)系统,它能够从单个、双目或RBG…

(01)ORB-SLAM2源码无死角解析-(06) 图像金字塔_ORB特征点
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(09)ORBextractor::operator()→FAST关键点均匀化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

ORB-SLAM2算法14之局部建图线程Local Mapping
文章目录 0 引言1 概述2 处理队列中的关键帧3 剔除坏的地图点4 创建新地图点5 融合当前关键帧和其共视帧的地图点6 局部BA优化7 剔除冗余关键帧 0 引言
ORB-SLAM2算法7详细了解了System主类和多线程、ORB-SLAM2学习笔记8详细了解了图像特征点提取和描述子的生成、ORB-SLAM2算法…
(01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最全slam从零开始-总目录
讲解关于slam一系列文章主要分为以下几个板块,其中的序列号代表其学习难度,入门学员建议从01开始学习,相同序列号表示其难度相当 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式…

(01)ORB-SLAM2源码无死角解析-(27) 共视图、本质图、拓展图
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(65) BA优化(g2o)→闭环线程:Optimizer::OptimizeEssentialGraph→本质图优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(34) 跟踪线程→初步了解跟踪线程,参考关键帧追踪TrackReferenceKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
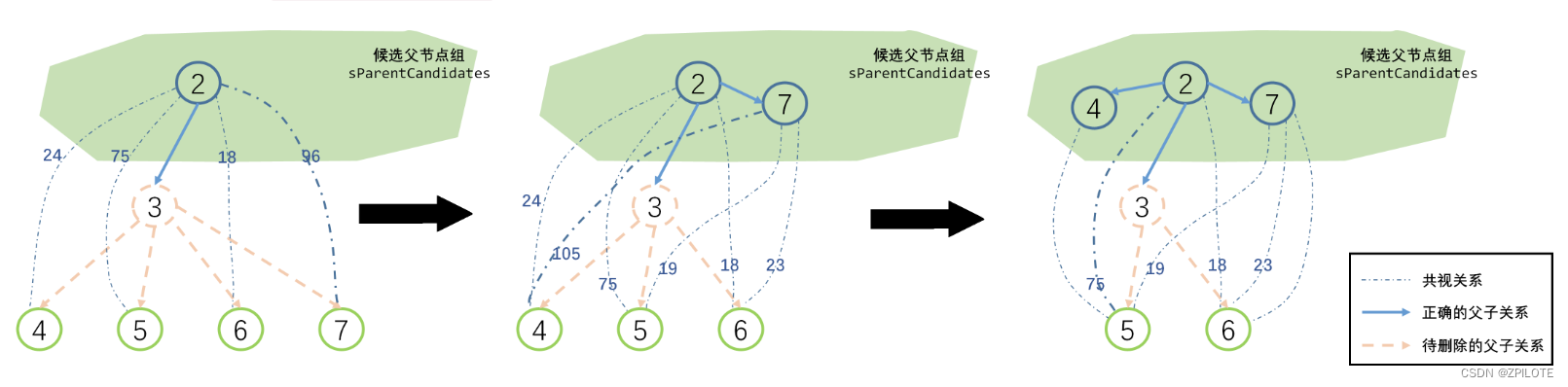
(01)ORB-SLAM2源码无死角解析-(52) 局部建图线程→剔除关键帧KeyFrameCulling()、整体线程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(20) 分解Homography,恢复Rt→Faugeras SVD-based decomposition
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(12)图像、特征点、关键点去畸变
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(07)ORBextractor::operator()→构建图像金字塔
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(50) 局部建图线程→流程以及处理新关键帧:ProcessNewKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(6) - 卡方分布(chi-square distribution)和()卡方检验(Chi-Squared Test) → 理论讲解与推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

(01)ORB-SLAM2源码无死角解析-(10)ORBextractor::operator()→灰度质心法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(1)→原理推导与奇异值求解举例
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
这篇博客,主要使用最通俗的语言来讲解SVD奇异值分解,通过该篇博客,将知道 SVD 的来龙去脉&…
(01)ORB-SLAM2源码无死角解析-(02)C++命名规范_总体框架解读
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(32) ORB特征匹配→跟踪线程BoW加速匹配,关键帧特征点跟踪SearchByBoW()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(10.2) - g2o(图优化)→顶点 (Vertex)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

史上最简SLAM零基础解读(10.4) - g2o(图优化)→示例代码讲解(slam十四讲第二版为例)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(15) 单目初始化MonocularInitialization()→Initializer
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(16) 单目初始化Initializer→八点发求解Homography矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(05) Tracking::Tracking()与 Frame::Frame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(24) 单目SFM地图初始化→CreateInitialMapMonocular()-细节分析:尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(63) BA优化(g2o)→局部建图线程:Optimizer::LocalBundleAdjustment→位姿与地图点优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(1) - 旋转平移矩阵→欧式变换推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言(线性变换)
该篇博客主要讲解一个 slam 中最基础的几个东西,那就是旋转矩阵,缩放矩阵以及偏移矩阵。本人会做…
(01)ORB-SLAM2源码无死角解析-(29) ORB特征匹配→ORBmatcher,汉明距离(单目初始化为例)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(57) 闭环线程→计算Sim3:理论推导(2)求解R,使用四元数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(18) SVD奇异值分解→求解Homography,Fundamental矩阵,了解矩阵自由度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
(01)ORB-SLAM2源码无死角解析-(40) EPnP 算法原理详解→理论基础四:QR分解(豪斯霍尔德Householder变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
(01)ORB-SLAM2源码无死角解析-(38) EPnP 算法原理详解→理论基础二:分情况求得beta初始解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/de…

ORB-SLAM2算法12之单目初始化Initializer
文章目录 0 引言1 单目初始化Initializer1.1 构造函数1.2 成员函数1.2.1 Initialize1.2.2 FindHomography1.2.3 FindFundamental1.2.4 ReconstructH1.2.5 ReconstructF 2 总结 0 引言
ORB-SLAM2算法7详细了解了System主类和多线程、ORB-SLAM2学习笔记8详细了解了图像特征点提取…

SLAM ORB-SLAM2(21)基础矩阵的计算和评分
SLAM ORB-SLAM2(21)基础矩阵的计算和评分 1. 前言2. 基础矩阵2.1. 对级约束2.2. 推导2.3. 计算原理 3. ComputeF214. CheckFundamental 1. 前言
在 《SLAM ORB-SLAM2(20)查找基础矩阵》 中了解到 查找基础矩阵主要过程࿱…
ORB-SLAM2算法10之图像关键帧KeyFrame
文章目录 0 引言1 KeyFrame类1.1 构造函数1.2 成员函数1.3 关键帧之间共视图1.3.1 AddConnection1.3.2 UpdateBestCovisibles1.3.3 UpdateConnections1.3.4 EraseConnection1.3.5 SetBadFlag 1.4 地图点1.5 生成树 2 KeyFrame用途 0 引言
ORB-SLAM2算法7详细了解了System主类和…

Ubuntu部署运行ORB-SLAM2
ORB-SLAM2是特征点法的视觉SLAM集大成者,不夸张地说是必学代码。博主已经多次部署运行与ORB-SLAM2相关的代码,所以对环境和依赖很熟悉,对整个系统也是学习了几个月,一行行代码理解。本次在工控机上部署记录下完整的流程。 ORB-SLA…

ORB-SLAM2_RGBD_DENSE_MAP编译、问题解决、离线加载TUM数据和在线加载D435i相机数据生成稠密地图
文章目录 0 引言1 安装依赖1.1 其他库安装1.2 pcl库安装 2 编译ORB-SLAM2_RGBD_DENSE_MAP2.1 build.sh2.2 build_ros.sh 3 运行ORB-SLAM2_RGBD_DENSE_MAP3.1 build.sh编译版本3.2 build_ros.sh编译版本 0 引言
ORB-SLAM2_RGBD_DENSE_MAP是基于ORB-SLAM2框架的一种RGB-D稠密地图…
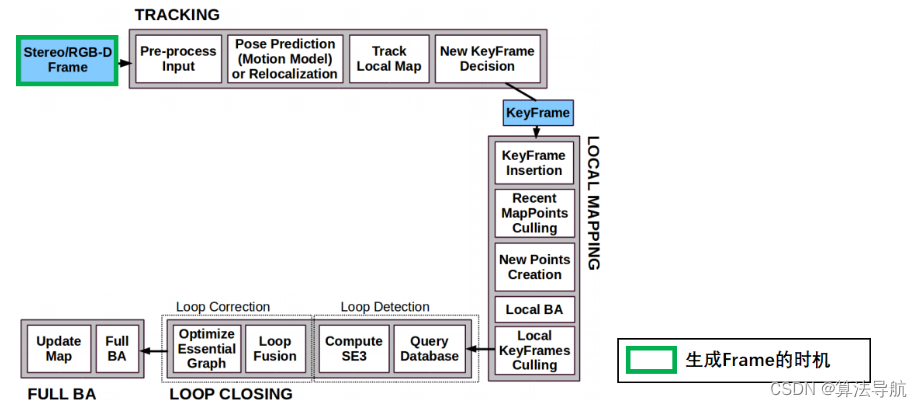
04 帧 Frame
文章目录 04 帧 Frame4.1 相机相关信息4.2 特征点提取4.2.1 特征点提取 ExtractORB()4.3 ORB-SLAM2对双目/RGBD特征点的预处理4.3.1 双目视差公式4.3.2 双目图像特征点匹配 ComputeStereoMatches()4.3.3 根据深度信息构造虚拟右目图像:ComputeStereoFromRGBD() 4.4 …
SLAM ORB-SLAM2(13)查找单应矩阵
SLAM ORB-SLAM2(13)查找单应矩阵 1. 前言2. FindHomography3. 特征点坐标进行归一化4. 选择归一化之后的特征点5. 八点法计算单应矩阵6. 评分并评优1. 前言
在 《SLAM ORB-SLAM2(12)估算运动并初始地图点》 的 2.3. 查找H矩阵和F矩阵 中
/* 构造线程来计算H矩阵和F矩阵及…

ORB-SLAM2学习笔记9之图像帧Frame
先占坑,明天再完善… 文章目录 0 引言1 Frame类1.1 成员函数1.2 成员变量 2 Frame类的用途 0 引言
ORB-SLAM2学习笔记8详细了解了图像特征点提取和描述子的生成,本文在此基础上,继续学习ORB-SLAM2中的图像帧,也就是Frame类&#…
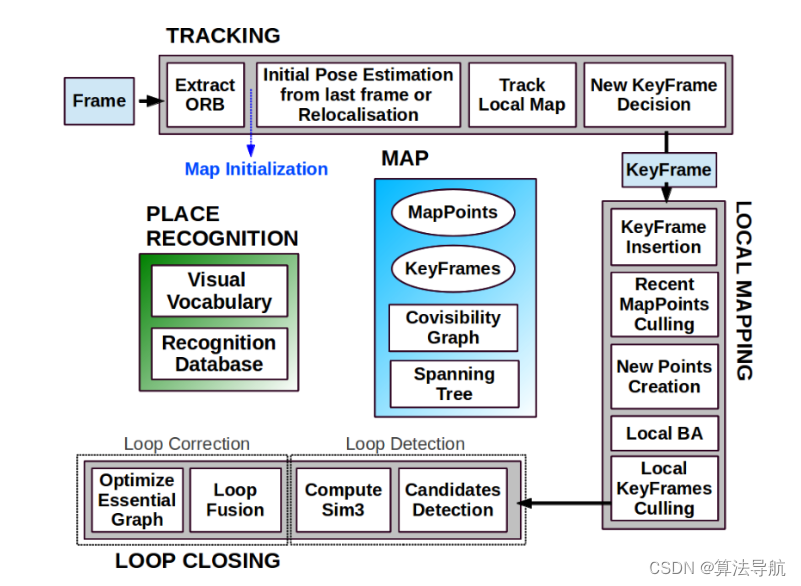
SLAM ORB-SLAM2(1)总体框架
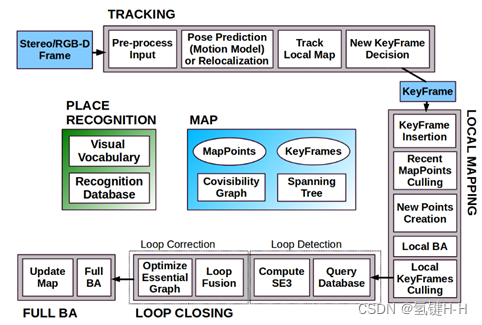
SLAM ORB-SLAM2(1)总体框架 1. 简介2. 框架3. TRACKING4. LOCAL MAPPING5. LOOP CLOSING6. MAP1. 简介
ORB-SLAM2 是一个实时和完整的视觉SLAM系统(包括闭环检测、重定位、地图重用等功能) 提供了利用单目、双目以及RGB-D相机完成稀疏三维重建的功能和接口 2. 框架 总体来说…
01 整体代码运行流程
文章目录 01 整体代码运行流程1.1 运行官方 Demo1.2 变量命名规则1.3 多线程1.4 线程锁1.5 SLAM 主类 System 01 整体代码运行流程
1.1 运行官方 Demo
以 stereo_kitti 为例,执行
./stereo_kitti path_to_vocabulary path_to_settings path_to_sequence./stereo_…
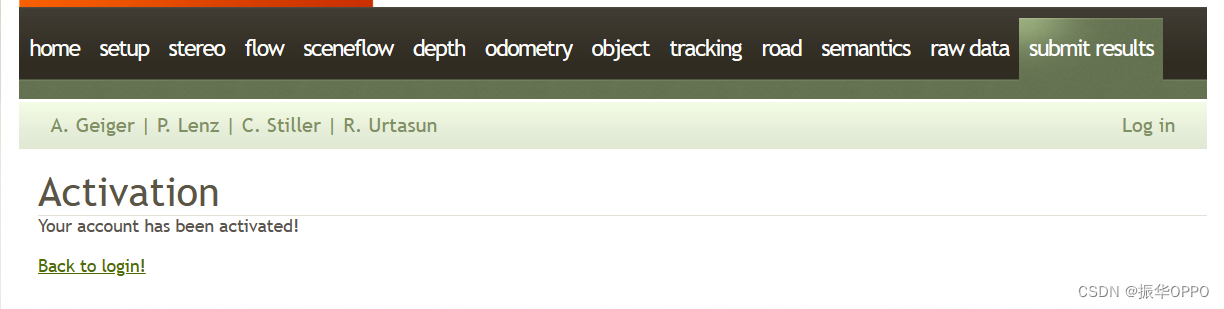
视觉SLAM数据集(三):KITTI 数据集
教程目录 一、官网二、注册登录三、下载数据集四、测试数据集 一、官网 官网地址:https://www.cvlibs.net/datasets/kitti/eval_odometry.php Kitti数据集很庞大,包含了双目、光流、场景流、深度、里程计、目标、跟踪、马路、语义、原始数据等大类别&…
SLAM ORB-SLAM2(6)系统对象
SLAM ORB-SLAM2(6)系统对象 1. 封装2. 成员变量2.1. 核心数据2.2. 三个对象2.3. 三个线程2.4. 跟踪状态3. 成员函数4. 构造函数5. 数据驱动接口1. 封装
在 《SLAM ORB-SLAM2(5)例程了解》 了解到创建了一个 ORB_SLAM2::System 类型的对象 然后不断的把数据供给该对象就可以…
SLAM ORB-SLAM2(16)奇异值分解
SLAM ORB-SLAM2(16)奇异值分解 1. 特征分解2. SVD的定义3. SVD的分解3.1. 右奇异向量3.2. 左奇异向量3.3. 奇异值矩阵4. 分解举例4.1. 构建方阵4.2. 特征分解4.2.1. 求特征值4.2.2. 求特征向量4.3. 求奇异值4.4. 奇异值分解5. 几何意义5.1. 奇异值矩阵
SLAM ORB-SLAM2(9)闭环检测器
SLAM ORB-SLAM2(9)闭环检测器 1. LoopClosing2. 成员变量2.1. 系统成员变量2.2. 关键帧2.3. 共视关系2.4. 闭环检测2.5. 全局 BA(光束法平差)2.6. 其他操作3. 成员函数3.1. 构造函数3.2. 主要函数3.3. 更新操作3.4. 标识设置和查询接口1. LoopClosing
在《SLAM ORB-SLAM2(…
ORB-SLAM2:基于可识别特征的自主导航与地图构建
ORB-SLAM2 :基于可识别特征的自主导航与地图构建 ORB-SLAM: Tracking and Mapping Recognizable Features转自 http://blog.csdn.net/cicibabe/article/details/50728748 翻译:2016年2月24日 Taylor Guo 摘要:视觉SLAM可以很好地构建地图&a…
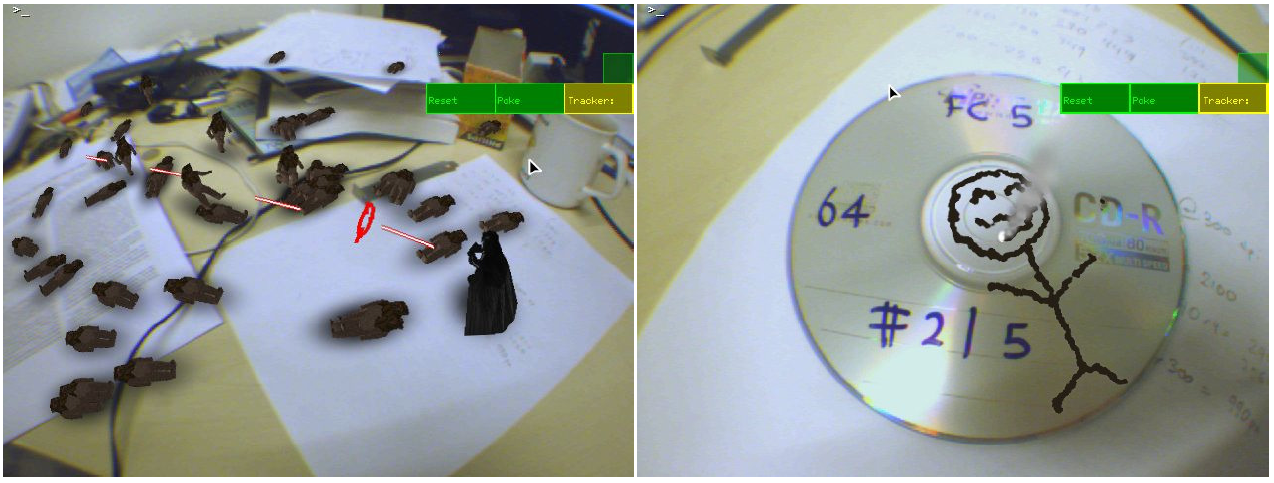
SLAM ORB-SLAM2(5)例程了解
SLAM ORB-SLAM2(5)例程了解 1. TUM 数据集1.1. 三种相机1.2. 目录结构2. 单目demo2.1. 参数校验2.2. 配置数据集图像路径2.3. 创建单目SLAM2.3. 处理图像数据2.4. 结束3. RGB-D demo3.1. 参数校验3.2. 配置数据集图像路径3.3. 创建 RGB-D SLAM3.3. 处理图像数据3.4. 结束4. 总…

(01)ORB-SLAM2源码无死角解析-(14) 地图初始化→单目初始化MonocularInitialization():尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(41) EPnP 源代码分析(1)→PnPsolver总体流程与思路
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(01) 环境搭建,demo运行,ROS一键安装_清除各种疑难杂症
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_…
(01)ORB-SLAM2源码无死角解析-(23) 单目SFM地图初始化→CreateInitialMapMonocular()-总体流程
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

ORB-SLAM2算法11之地图点MapPoint
文章目录 0 引言1 MapPoint类1.1 构造函数1.2 成员函数1.2.1 AddObservation1.2.2 EraseObservation1.2.3 SetBadFlag1.2.4 Replace1.2.5 ComputeDistinctiveDescriptors1.2.6 UpdateNormalAndDepth1.2.7 PredictScale 2 MapPoint类用途 0 引言
ORB-SLAM2算法7详细了解了Syste…